AML Logo Design Project
Non-designer designs the design of laboratory’s symbol, interestingly.
This post was written by referring Andrew Ng’s lec note in Stanford University
Suppose we have only unlabeled training examples set. An AutoEncoder neural network is an unsupervised learning algorithm that applies backpropagation, setting the target values to be equal to the inputs. I.e., it uses $y^{(i)}=x^{(i)}$
Main Concept
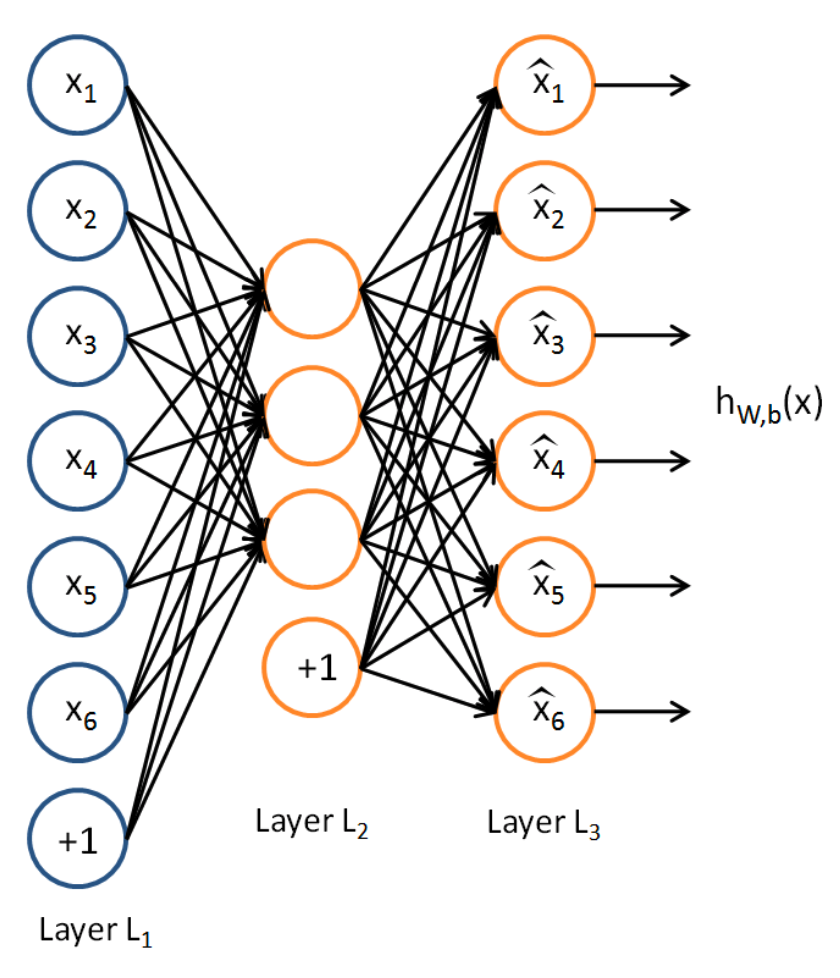
As autoencoder set target values to be equal to the inputs, it tries to learn a function $h_{W, b}(x) = \hat{x} \approx x$
Let’s assume, we are training 100 pixels(10 by 10) images and put hidden layer in $L_2$ which has 50 units(neurons). That is, the constraints on the network is implemented. Through this, we can discover interesting structure about the data.
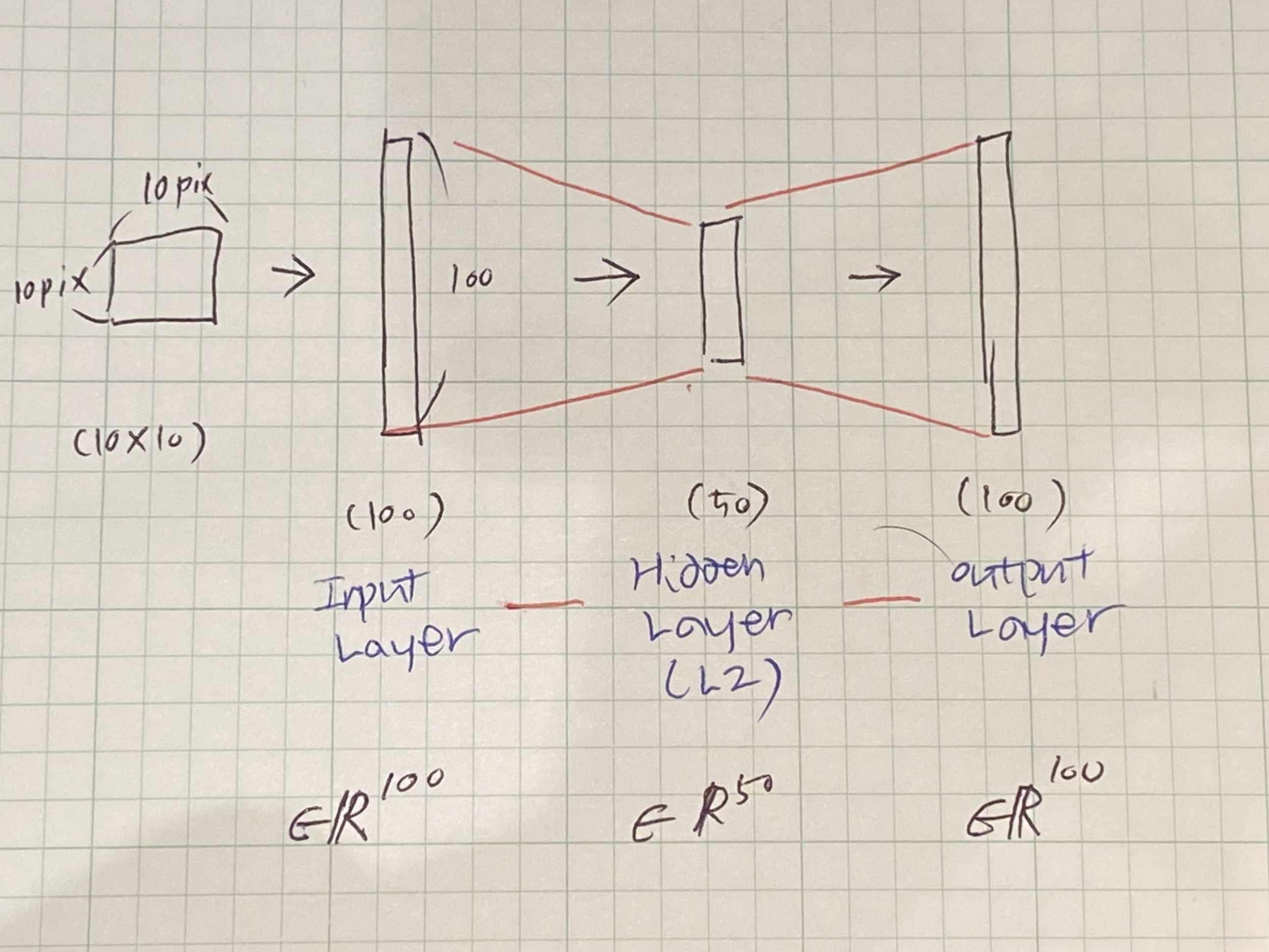
Here, inputs $x$ are 100 pixels image so $n = 100$. Then, for autoencoding, 50 units were implemented which is, $s_2 = 50$, to layer $L_2$. As output ought to be 100 pixels, $y \in \mathbb{R}^{100}$, with no doubt.
Parameters(or each $x_i$) are set IID Gaussian independent. Compress from 100 to 50 would be very very difficult. But if there is structure in the data, same to say ‘some of the input features are correlated’, then this algorithm can discover some of those correlatoins. That is the key idea of autoencoding
There is the case the number of units in the hidden layer is larger than that in the input layer, here $s_2 = 200$. Still, we can discover interesting structure. In particular, if we impose SPARSITY constraints on the $s_2$, the autoencoder can discover the interesting structure in the data, even the number of hidden units is large.
for SIGMOID activation function,
Neuron is considered “active” or “firing” when its outvalue is close to 1.
Neuron is considered “inactive” when its outvalue is close to 0.
(If you are using a tanh activation function, then we think of a neuron as being inactive when it outputs values close to -1)
Here, we would like to constrain the neurons to be inactive most of the time.
$\sum_{j=1}^{s_{2}} KL \left( \rho || \hat{\rho}_{j} \right)$ where
$\rho$ : Bernoulli random variable with mean $\rho$
$\hat{\rho}$ : Bernoulli random variable with mean $\hat{\rho}$
KL diversion, which is abbreviation of Kullback–Leibler divergence, is a measure of how one probability distribution is different from a second, reference probability distribution. We got two Bernoulli random variable($\rho, \hat{\rho}$) and then eager to compare the distribution by gauging relative entropy of the two.
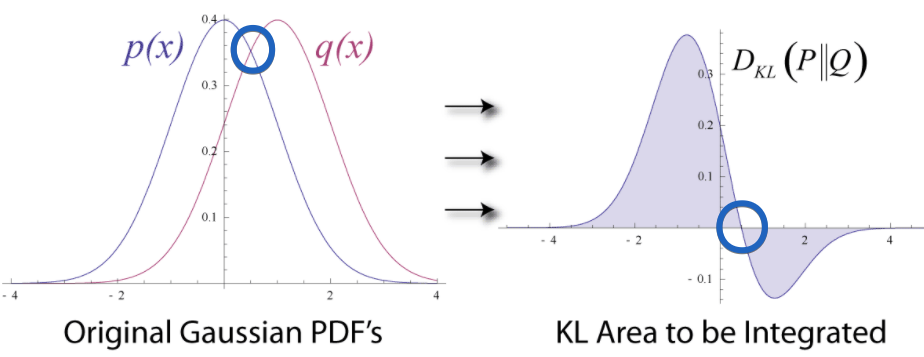
To simplify KL divergence, intuitively, (SEE LEFT)two distribution $p(x), q(x)$ shapes similar(guess the same) but have small difference in the mean. Gaussian Distribution $p(x)$ has mean of ‘0’. Probability on the right hand side of $x=0$ decreases while $q(x)$ is not. And they have same prob at $x\approx 0.4$ (SEE RIGHT) If two mean is the same, divergence is zero and can be seen in blue circle. To say by formula, \(\mathrm{KL}\left(\rho \| \hat{\rho}_{j}\right)=0\) if $\hat{\rho}_{j}=\rho$
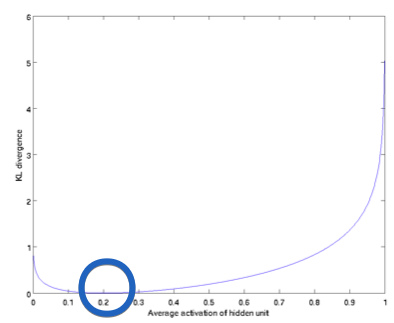
We have set $\rho = 0.2$ and plotted \(\mathrm{KL}\left(\rho \| \hat{\rho}_{j}\right)\) for a range of values of . and we see that KL-divergence reaches its minimun(blue circle) at $\hat{\rho}_{j}=\rho$ and blows up as it approaches to 1.
Thus, minimizing this penalty term has the effect of causing $\hat{\rho}$ to be close to $\rho$
Then, overall cost function is now
$J_{\text {sparse }}(W, b)=J(W, b)+\beta \sum_{j=1}^{s_{2}} \mathrm{KL}\left(\rho | \hat{\rho}_{j}\right)$ where $\beta$ controls the weight of the sparsity penalty term.
The term $\hat{\rho}$ implicitly depends on $W, b$ also, beacuse it is the average activation of hidden unit $j$, and the activation of a hidden unit depends on the parameters $W,b$.
To apply KL-divergence to error term function, we retrieve that we backpropagated as below.
$\delta_{i}^{(2)}=\left(\sum_{j=1}^{s_{2}} W_{j i}^{(2)} \delta_{j}^{(3)}\right) f^{\prime}\left(z_{i}^{(2)}\right)$
now instead we compute,
$\delta_{i}^{(2)}=\left(\left(\sum_{j=1}^{s_{2}} W_{j i}^{(2)} \delta_{j}^{(3)}\right)+\beta\left(-\frac{\rho}{\rho_{i}}+\frac{1-\rho}{1-\rho_{i}}\right)\right) f^{\prime}\left(z_{i}^{(2)}\right)$
if we implement the autoencoder using backpropagation modified this way, you will be performing gradient descent exactly on the objective $J_{\text {sparse }}(W, b)$.
Consider the case of training autoencoer on 10 X 10 images, so that $n = 100$. Each hidden unit $i$ computes a function of input:
Not The End
Non-designer designs the design of laboratory’s symbol, interestingly.
How to Use GSDS GPU Server
Fairness Definitions Explained
Fairness ML is the remedy for human’s cognition toward AI
과학자의 자세
미션: Shell 운용하는와중에 구글 검색하느라 시간 버리지 않기
Life Advice by Tim Minchin / 이번생을 조금이나마 의미있게 살고자
TensorflowLite & Coral Arsenal
Hivemapper,a decentralized mapping network that enables monitoring and autonomous navigation without the need for expensive sensors, aircraft, or satellites.
AMP Robotics, AI Robotics Company
자율주행 자동차 스타트업 오로라
Here I explore Aurora, tech company founded by Chris Urmson
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks
미국의 AI 스타트업 50곳
2014 mid 맥북프로에 리눅스 얹기
Sparse Encoder, one of the best functioning AutoEncoder
Basic Concept of NN by formulas
싱글뷰 이미지로 다차원뷰를 가지는 3D 객체를 생성하는 모델
고통의 코랄 셋업(맥북)
HTML 무기고(GFM방식)